

In the automotive industry, ISO 26262 is a well-known standard that focuses on Functional Safety (FuSa) in electronic systems.
Historically, vehicles were primarily mechanical, but in the last 10-15 years, electronics have increasingly shaped the way automobiles function. Today, automotive electronics are crucial for differentiating vehicles, and this trend is expected to continue, making automobiles more advanced and electronically driven.
The primary goal of any vehicle is to ensure safe transportation. However, as vehicles become more complex with increased electronics content, malfunctions in hardware or software can endanger safety.
ISO 26262 decisively confronts this concern by establishing a strict framework that systematically identifies and mitigates potential risks linked to electronic malfunctions. It clearly defines the safety requirements essential for developing reliable systems, guaranteeing that all risks are thoroughly analyzed and effectively managed. This proactive approach ensures reliability and reinforces confidence in the safety of these systems.
To understand how ISO 26262 is applied in practice, let’s examine Forward Collision Warning (FCW) systems. This safety feature is designed to detect potential collisions and alert the driver in time to help prevent accidents.
According to the Society of Automotive Engineers (SAE), Forward Collision Warning systems can reduce rear-end collisions by up to 50%, making them a crucial automotive safety technology. Given its crucial role in accident prevention and lifesaving, FCW systems must comply with Functional Safety standards to ensure their effectiveness and meet regulatory compliance.
This piece will explore the key requirements, safety compliance requirements, and development process for FuSa compliance under ISO 26262
Key Functional Safety Requirements for FCW
FCW systems require integrating multiple sensors, such as radar, LiDAR, and cameras, to detect other vehicles, pedestrians, and obstacles. The ISO 26262 standard mandates rigorous safety measures to ensure that these components operate reliably under various conditions. Key aspects include:
- ASIL Classification: Hazard Analysis and Risk Assessment (HARA) defines the Automotive Safety Integrity Level (ASIL) for FCW, typically classified as ASIL B or ASIL D depending on system complexity.
- Fail-Safe Mechanisms: Detection of system faults and transitioning to a safe state.
- Sensor Redundancy: Multi-sensor fusion enhances detection reliability.
A thorough risk assessment is performed for ASIL classification to implement effective safety measures, considering potential failure scenarios. The system is assigned an ASIL level based on severity, which informs necessary safety measures, redundancy, monitoring, and testing.
Fail-safe mechanisms include continuous diagnostics and real-time fault detection, allowing the system to revert to a safe state by activating backups or initiating emergency braking when needed. Sensor redundancy is achieved by fusing data from multiple sensors, ensuring reliable detection even if one fails. This redundancy allows FCW systems to operate effectively in various conditions, sticking to high safety standards and fulfilling ISO 26262 requirements in the automotive setting.
System Architecture and Redundancy Considerations
To ensure the reliability of an FCW system, a strong architecture that includes redundancy and fail-operational strategies is crucial. The primary components of this architecture are:
- Sensors (Cameras, Radar, LiDAR): These sensors work together to capture real-time environmental data, providing comprehensive situational awareness of potential hazards like other vehicles, pedestrians, or obstacles.
- Electronic Control Unit (ECU): The ECU processes the sensor data and executes risk assessment algorithms that determine the need for intervention.
- Actuators (Braking and Steering Systems): Automatically triggering corrective actions to help prevent or mitigate collisions.
A multi-sensor fusion approach improves reliability. For instance, if the primary camera sensor fails due to adverse weather conditions, radar or LiDAR can take over to maintain FCW functionality. To further safeguard the system, the ECU must include safety features such as watchdog timers, error correction codes (ECC), and lockstep processing to ensure that any system fault or failure is promptly detected and handled.
Safety Mechanisms and Fault Tolerance
To comply with ISO 26262, FCW must implement various safety mechanisms, including:
- Self-Diagnostics and Monitoring: Continuous health monitoring of sensors and actuators to detect failures.
- Fail-Safe Mechanisms: Alerting the driver instead of providing incorrect warnings or unintended braking in case of failures.
- Hardware and Software Diversity: Using diverse implementations of critical functions to prevent systematic failures.
- Safe Communication Protocols: Ensuring reliable data transfer between components through CRC and Time-Triggered Ethernet (TTE).
- Power Management Strategies: Handling power fluctuations, brownouts, and voltage spikes.
These mechanisms, when implemented effectively, guarantee that the FCW system remains operational and reliable, even in the face of potential faults, aligning with the stringent safety requirements set by ISO 26262.
Software Development and Verification under ISO 26262
FCW software follows the V-model development process for traceability and validation. Model-Based Development (MBD) allows authorities to simulate safety-critical functions before deployment. Key principles include:
- MISRA-C Compliance: Enforcing safe coding practices to minimize the risk of introducing software errors that could threaten system safety
- Memory Partitioning: Preventing unintended interactions between critical and non-critical software to ensure that failures in non-critical areas do not affect the performance or integrity of safety-critical functions
- ASIL Decomposition: Optimizing safety and performance balance by splitting functionalities into separate ASIL levels to apply different safety measures to each component based on its criticality.
Testing and Validation:
To ensure safety and compliance with ISO 26262 standards, various methods are employed, including Software-in-the-Loop (SIL) and Hardware-in-the-Loop (HIL) testing. These methods verify the functionality and real-time performance of both software and hardware components, ensuring they work together effectively. Fault Injection Testing (FIT) is utilized to assess system resilience by introducing faults and confirming that fail-safe mechanisms and redundancies function as intended. Also, safety assessment audits are conducted to review development processes and safety measures, managing risks and guaranteeing the system’s safety and reliability. These comprehensive testing and validation strategies ensure that FCW systems are both dependable and safe for real-world use.
Diagram
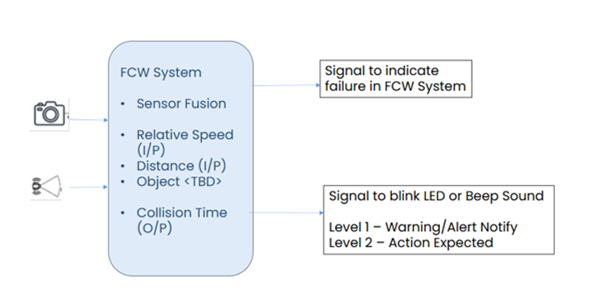
Below is the Forward Collision Warning System Architecture, showcasing:
- Sensor Data Acquisition: Camera, Radar, and LiDAR sensors capture real-time data.
- Sensor Data Processing: Data cleaning, preprocessing, and sensor fusion.
- Data Transmission: Communication via CAN, LIN bus, and Ethernet to the ADAS ECU.
- Collision Warning Algorithm: Risk assessment, decision-making, and threat level classification.
- HMI Interface: Audio alerts, dashboard indications, and driver notifications.
- Vehicle Control Interface: Braking and steering system interventions.
Challenges and Best Practices
Key challenges in implementing FCW systems include:
- Balancing Performance and Safety: High-performance computing must align with deterministic safety requirements.
- Handling False Positives and Negatives: Ensuring accurate threat detection without unnecessary braking.
- Managing Cybersecurity Risks: Secure boot, secure communication, and anomaly detection mechanisms must be implemented.

Best Practices:
- Integrate functional safety from early design stages.
- Utilize standardized automotive frameworks like AUTOSAR.
- Conduct continuous safety assessments with real-world testing.
- Implement secure OTA updates while maintaining compliance.
To conclude, ensuring functional safety compliance in FCW systems is critical for enhancing road safety and meeting automotive regulatory requirements. By integrating redundant architectures, implementing rigorous safety mechanisms, and following ISO 26262 guidelines, manufacturers can develop FCW solutions that effectively mitigate collision risks.
As automation advances, Forward Collision Warning systems will evolve with AI-driven predictive analytics and V2X communication, enhancing their accuracy and enabling more proactive safety measures. This progression promises even safer, smarter vehicles for the future.
MosChip® has extensive expertise in functional safety, sensor fusion, and embedded software, which enables automotive stakeholders to develop advanced automotive systems that enhance road safety.
With a deep understanding of Advanced Driver Assistance Systems (ADAS), MosChip® can assist in integrating multi-sensor architectures to provide reliable solutions. Additionally, MosChip® employs cutting-edge AI and machine learning techniques to improve object detection and decision-making, allowing for accurate risk prediction and the initiation of autonomous actions.
About The Author
Ronak Jain is a Manager at MosChip® with 10 years of experience in Embedded Systems Development. His expertise spans firmware development, Board Support Package (BSP) development, Linux device drivers, and applications for bare-metal and RTOS environments.
Ronak has actively contributed to the mainline Linux kernel and Arm Trusted Firmware, demonstrating his deep technical proficiency in embedded software. His expertise extends to Functional Safety, particularly ISO 26262, where he has hands-on experience ensuring compliance in automotive safety-critical systems.
{kind=link}